Alëna Rodionova
Senior Software Developer at Waabi, Motion Planning team.
Ph.D. from University of Pennsylvania, Electrical and Systems Engineering.

Curriculum Vitae (PDF)
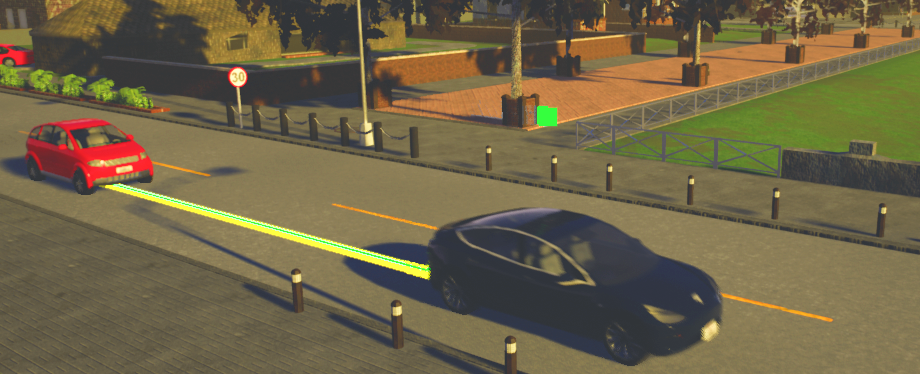
I am currently a Senior Software Engineer at Waabi, where we are building the next generation of autonomous trucking technology. In particular, I design and develop motion planning software that operates in dynamic, uncertain and interactive traffic scenarios.
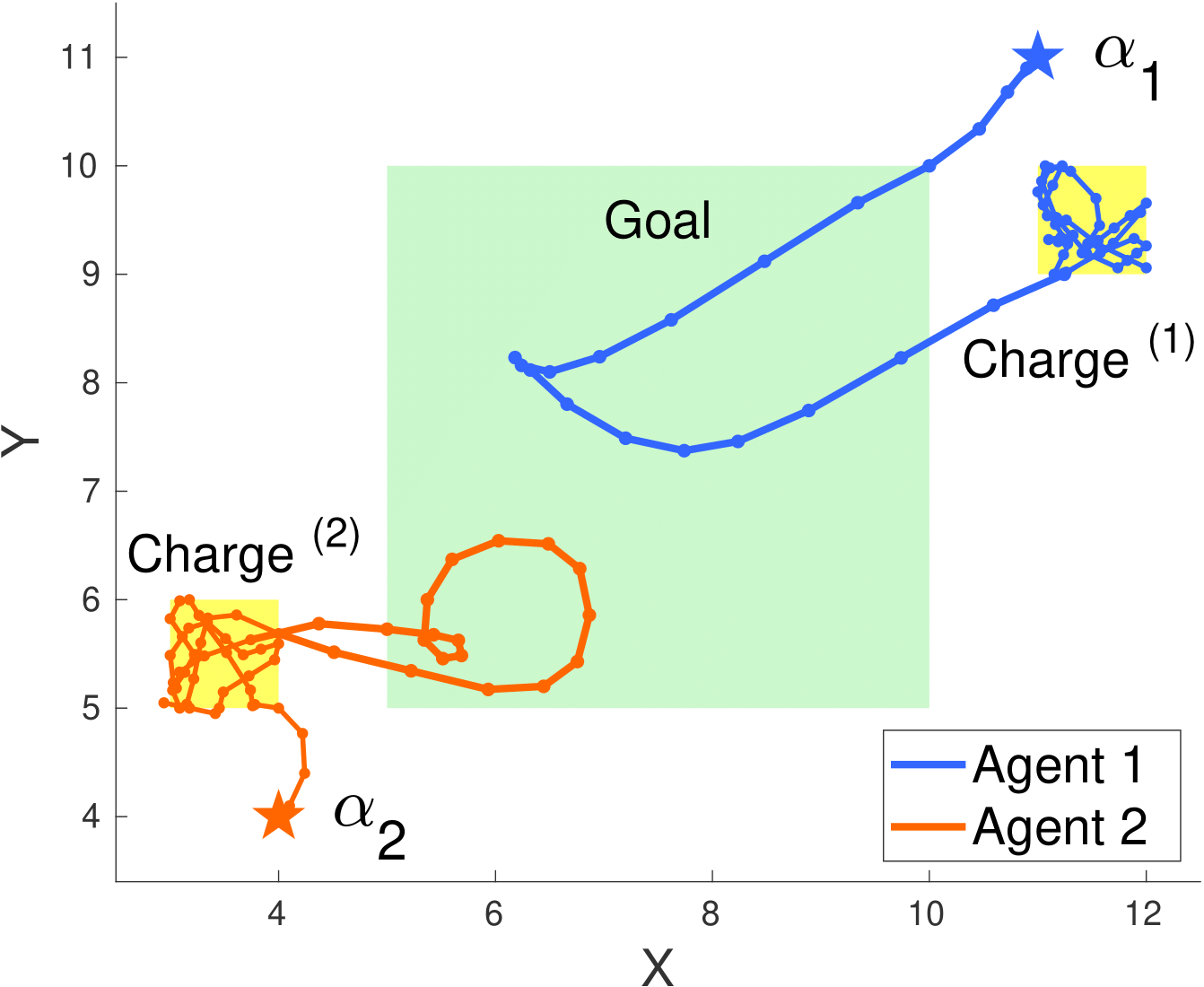
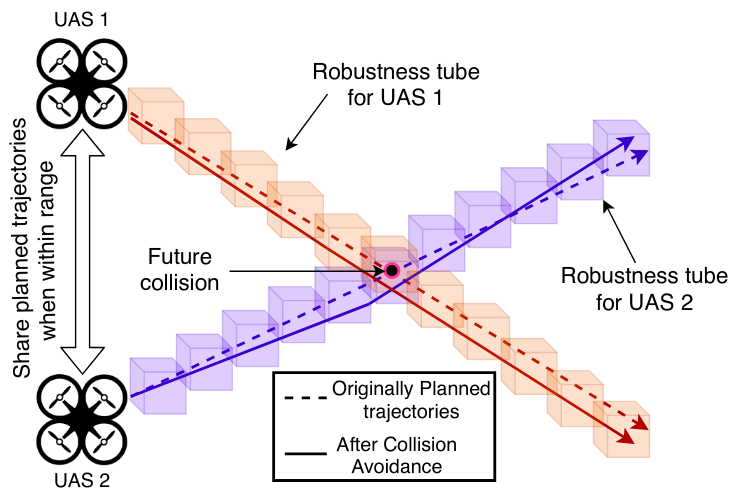
I received a Ph.D. in Electrical and Systems Engineering from the University of Pennsylvania. I have expertise in robust planning and control, formal methods and temporal logics. My research was primarily focused on formal analysis, verification and control of autonomous Cyber-Physical Systems (CPS). One of the most exciting projects I led and worked on was about time-robust planning and distributed collision avoidance for unmanned aerial vehicles, ground vehicles and other time-critical systems.
Prior to joining the University of Pennsylvania in 2017, I was with the Cyber-Physical Systems group at TU Wien, Austria, investigating specification languages for Safety-Critical Systems. Previously, I have worked at Intel's Autonomous Driving Research Lab (Hillsoro, OR) and General Motors's ECS process, methods and tools group (Warren, MI).
I hold an M.S in Applied Mathematics and B.S. in Mathematics from Siberian Federal University (SibFU), Russia.
I am a recipient of the 2022 Charles Hallac and Sarah Keil Wolf Award for best doctoral dissertation, best student paper awards at CDC 2021 and HSCC 2016, best paper finalist at HSCC 2022 and a recipient of the MIT Rising Stars Award.
News
| Mar 30, 2023 | I am happy to receive the 2022 Charles Hallac and Sarah Keil Wolf Award for Best Dissertation! |
|---|---|
| Jan 17, 2023 | I joined Waabi as a Senior Software Developer. |
| Nov 18, 2022 | I successfully defended my PhD dissertation entitled "Robustness of Temporal Logics with Applications to Safe Autonomy"! |
| May 6, 2022 | Our paper on Time-Robust Control for STL Specifications was nominated for the IEEE Control Systems Society Roberto Tempo Best CDC Paper Award, 2022. |
| May 6, 2022 | Our paper on Temporal Robustness of Stochastic Signals was selected as a best paper finalist at the 25th ACM International Conference on Hybrid Systems: Computation and Control (HSCC), 2022. |
| Dec 17, 2021 | Our paper on Time-Robust Control for STL Specifications won the best student paper award at the 60th IEEE Conference on Decision and Control (CDC), 2021. |
| Feb 4, 2021 | Our paper on Learning-based Decentralized Multi-UAV Collision Avoidance will appear in the ACM Transactions on Cyber-Physical Systems. |
| Oct 18, 2020 | Our paper won the best paper in session (UAV conflict management) award at DASC 2020. |